This project aims at the development of a new Short Range Positioning technology, capable of enabling and facilitating new applications. Main target applications are innovative data gloves, and wearable biometric systems for biomedical activities.
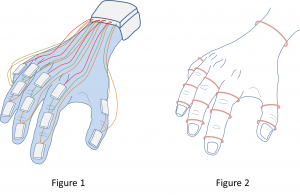
With respect to a typical hand tracker shown in Fig. 1, the proposed would consent to track the unrestrained motion of individual fingers and phalanxes, with a higher operational range, moving from the scenario described in Fig. 1 towards the scenario described in Fig. 2, using multiple ring sized wireless nodes for and pose estimation.
Targets:
- Development of an advanced Short Range Wireless Positioning System (SRWPS), wireless powered, with sub-centimeter accuracy and a measurement rate of at least 50 mps, capable of tracking multiple ring sized and wearable mobile nodes;
- Identification and development of applications based on the developed SRWPS in biomedical and haptics field (posture tracking, fine motor skills monitoring, accurate remote-manipulation);
- Dissemination of the obtained results in the scientific and industrial community.
Results:
- A working wireless scalable positioning system, capable of 6DoF positioning of multiple ring sized wearable mobile nodes. Main features of the proposed system will be the smart scalability that will allow the hot plug and play of new nodes and the good degree of accuracy that will allow sub-centimeter positioning error;
- Experimental comparison with other state of the art positioning techniques mentioned in the literature;
- Availability of wireless power transfer techniques, aimed at minimizing the mobile node size (by relaxing the requirements on the mobile node battery) and at increasing the mobile node lifetime;
- A working accurate and SRWPS prototype, capable of tracking multiple ring sized mobile nodes with the expected accuracy;
- A working and innovative data glove, that will take advantage of the SRWPS. The main innovation here is to develop a low-power and low-cost data glove integrating a fast and accurate 3D positioning system. The data glove will be manufactured adopting wearable technologies aiming at developing ring-sized wireless nodes, preferably self-sustained by power harvesting techniques;
- A 3D pose estimation algorithms exploiting cinematic and dynamic constraints on the body object and fusion of the information with other sensors. The method will provide robust estimations, overcoming visual occlusions and will be resilient to mechanical and EM disturbances;
- Experimental results demonstrating the capabilities of the developed wireless positioning system, both in controlled environments and in real life scenarios; In particular, the metrological performance of the realized system will be also tested under the influence common wireless disturbances present in both civil indoor;
- Experimental results validating the bio-medical/haptics applications/solutions exploiting the developed SRWPS. In particular a number of scenarios considering the monitoring of physical frailty, dependency, postural instability and rate of falls will be developed under the cooperation with a team of doctors and rehabilitation professionals.