This video, prepared in cooperation with the Res4Net group (https://www.res4net.polimi.it), presents the development of an accurate wireless short range positioning system, based on inductive coupling. The presented research is a result of the “6 DOF Finger Tracking” Project, an inter-academic collaboration supported by the Italian Ministry of Education, University and Research (MIUR) through the grant PRIN 2015 (Projects of Relevant National Interest, project code: 2015C37B25).
F. Santoni, A. De Angelis, A. Moschitta and P. Carbone, “MagIK: A Hand-Tracking Magnetic Positioning System Based on a Kinematic Model of the Hand,” in IEEE Transactions on Instrumentation and Measurement, vol. 70, pp. 1-13, 2021, Art no. 9507313, doi: 10.1109/TIM.2021.3065761. Preprint
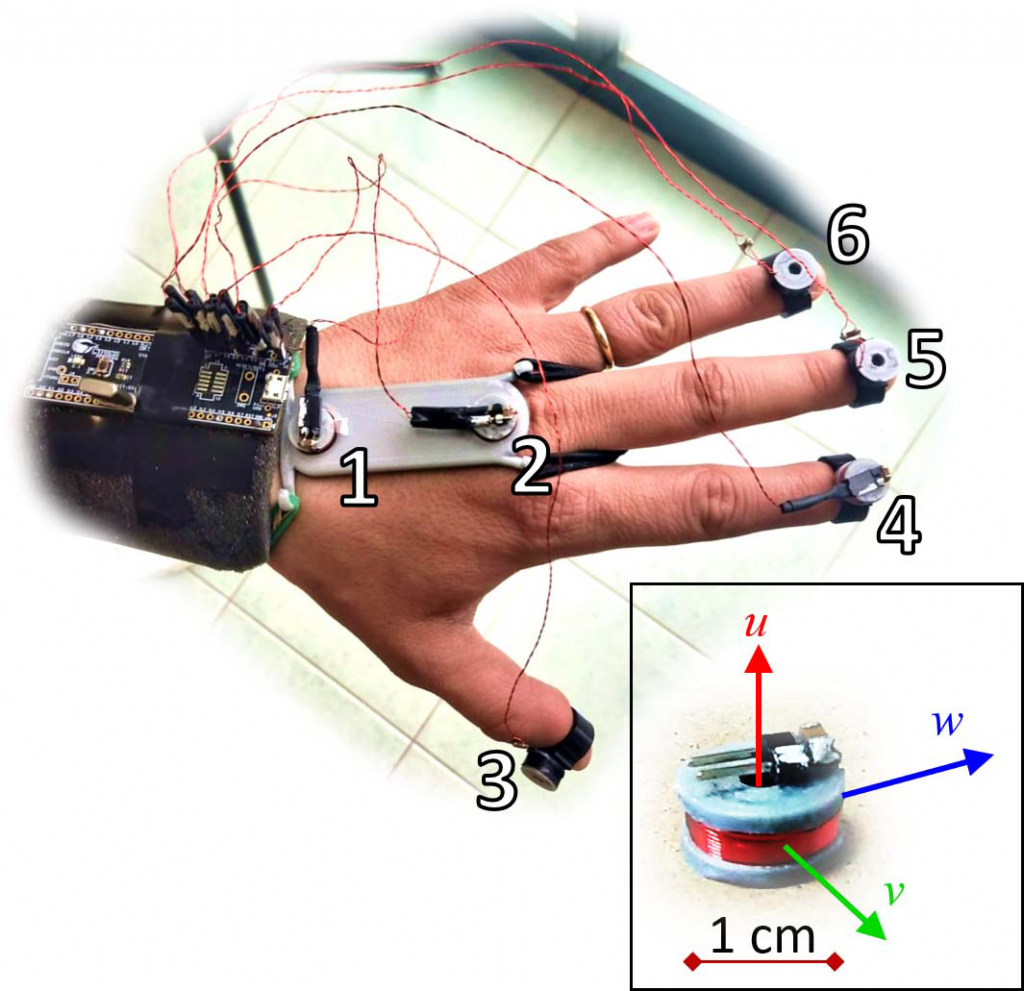
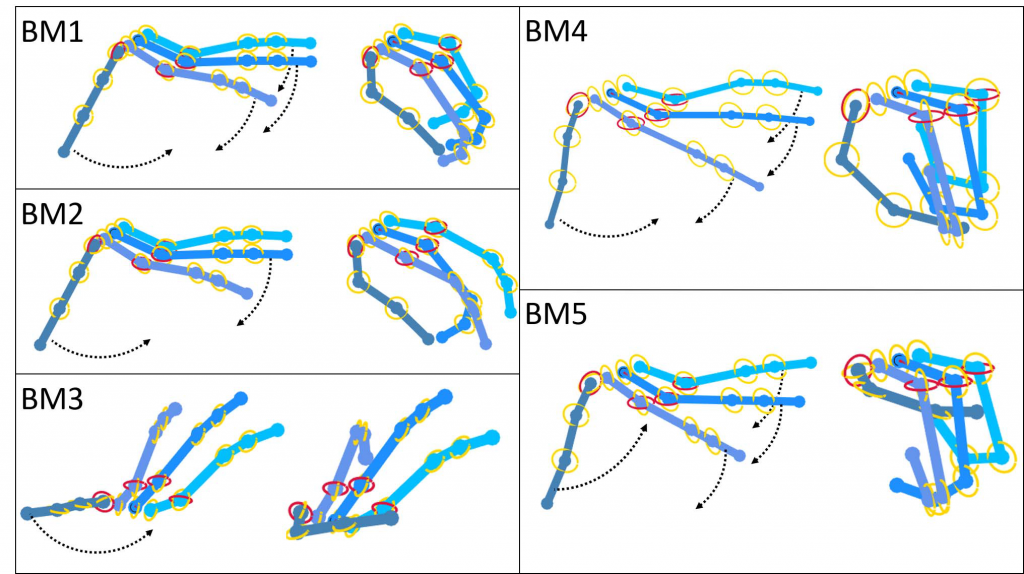
Abstract: In this article, we present a hand-tracking system based on magnetic positioning. A single magnetic node is mounted on each fingertip and two magnetic nodes on the back side of the hand. A fixed array of receiving coils is used to detect the magnetic field, from which it is possible to infer the position and orientation of each magnetic node. A kinematic model of the whole hand has been developed. Starting from the positioning data of each magnetic node, the kinematic model can be used to calculate the position and flexion angle of each finger joint, plus the position and orientation of the hand in space. Relying on magnetic fields, the hand-tracking system can work also in non-line-of-sight conditions. The gesture reconstruction is validated by comparing it with a commercial hand-tracking system based on a depth camera. The system requires a small number of electronics to be mounted on the hand. This would allow building a light and comfortable data glove that could be used for several purposes: human–machine interface, sign language recognition, diagnostics, and rehabilitation.
G. Cerro et al., “A real-time tracking system for tremor and trajectory estimation in Parkinson’s disease affected patients”, in 2020 IEEE International Symposium on Medical Measurements and Applications (MeMeA), Bari, Italy,2020, pp. 1-6, doi: 10.1109/MeMeA49120.2020.9137210
Abstract The paper proposes a first step toward the realization of a low cost and scalable clinical device to monitor the evolution of Parkinson’s disease based on magnetic measurements. The main aim of the overall research project is the realization of an internet-connected device able to allow the execution of standardized tests and share results with specialized medical centers. At this stage, the system has been focused on two parameters useful for medical exams: tremor and hands trajectory. The paper describes the realized set-up based on fixed receiving coils and one mobile transmitting coil and proposes first experimental results executed on a robotic arm adopted as a reference. Obtained results clearly show the capability of the realized system to estimate the right frequency of the tremor and the identify the right trajectory even if high levels of tremor are applied.
~30 measurements per second Mean positioning error: 2 mm Max positioning error: 8 mm
The robot is used to test the accuracy of the measurements. Green dots and arrow: real position and attitude Red dots: measured position Yellow arrow: measured attitude
We will include all blueprints and and the list of materials
Francesco Santoni, Alessio De Angelis, Antonio Moschitta and Paolo Carbone A Distributed Data Acquisition Architecture for Magnetic Positioning Systems
Abstract: We illustrate a devised and partially implemented data acquisition system (DAQ) for a magnetic positioning system (MPS) that is currently under development. This system aims to track position and attitude of an active transmitting coil (TX) supplied with a sinusoidal current, whose generated magnetic field induces tensions on an array of passive receiving coils (RX). The DAQ system has to acquire voltages from all RX coils. These signals are then processed according to a mathematical model in order to estimate the TX coordinates. In order to track the TX in real-time with a good resolution, data acquisition and processing have to be fast. In particular voltages have to be measured simultaneously on all RXs. To achieve this, we opted for a distributed architecture of microcontroller units (MCU). To acquire voltages, each MCU has four analog-to-digital converters (ADC) that can work in parallel. Moreover multiple MCUs can be triggered simultaneously by a single MCU in a master-slave configuration. We used MCUs with a fast dual-core CPU. Each unit can directly process its own acquired signals, then all data are sent to the master MCU, which estimates the coordinates of the TX. According to a preliminary analisys, this tracking system should achieve more than fifty coordinates measurements per second.
A. De Angelis, G. De Angelis, F. Santoni, M. Dionigi, M. L. Fravolini, A. Comuniello, A. Moschitta, P. Carbone, P. Bellitti, M. Borghetti, M. Bona, M. Serpelloni, E. Sardini, F. Milano, D. Capriglione, M. Laracca, G. Miele, L. Ferrigno, G. Betta
Six DOF Scalable Finger Tracking System
Video shown during the presentation: Fast Real-time Acquisition with Magnetic Positioning System
Francesco Santoni, Alessio De Angelis, Antonio Moschitta and Paolo Carbone Calibrating a magnetic positioning system using a robotic arm
Abstract: A robotic arm moving its end-effector along userdefined trajectories is used to calibrate a Magnetic Positioning System (MPS). The principle of operation of the positioning system is reviewed. Position and attitude of an active coil are estimated measuring the induced voltage on a set of fixed coils, with known position and versor. The Unscented Kalman Filter (UKF) is used to smooth the measured trajectories. In order to estimate the precision up to which ground-truth trajectories are
traced by the robotic arm, a calibration procedure of the robot is illustrated. The active coil is fixed on the end-effector of the robot, and ground-truth trajectories are then tracked in order to calibrate the whole MPS plus UKF system. A wide groundtruth trajectory is used to obtain a fine estimate of positions and versors of the fixed coils. Using the parameters thus obtained, several trajectories are tracked. The UKF is tuned in order to minimize the error affecting the estimated position and attitude of the active coil at each point of any trajectory.
Video shown during the presentation: Real-time acquisition with Magnetic Positioning System
Alessio De Angelis, Paolo Carbone and Johan Schoukens Generating Low-Distortion Ternary Signals Using an Imperfect DAC and ADC Chain
Abstract: In this paper, the problem of generating ternary signals with high spectral purity using imperfect equipment is addressed. In particular, a low-cost setup comprised of a nonuniform digital-to-analog converter (DAC), an analog filter, and a nonuniform analog-to-digital converter (ADC) is considered.
First, the effect of DAC nonlinearity on the spectrum of randomized constrained sequences (RCS) is described and validated. Then, based on this effect, a method for generating RCS signals with high spectral purity is proposed. The feasibility of this method is evaluated by numerical simulations and experimental tests.
Guido De Angelis, Alessio De Angelis, Antonio Moschitta and Paolo Carbone Identification of Resonant Circuits’ Parameters Using Weighted-Least-Squares Fitting
Abstract: Identification of RLC circuital parameters is investigated. We present a method for estimating the parameters of the circuit transfer function. The theoretical background is discussed, theoretical models are presented and experimentally validated. A practical implementation is presented and employed to validate the considered numerical models. Numerical and experimental results demonstrate that the proposed system provides a good accuracy measurement of the parameters of the resonant circuit.
The experimental results validate the considered numerical models with a discrepancy of less than 10% with respect to measurement models.
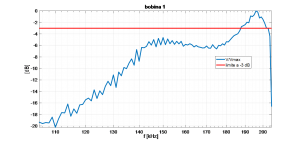
Today at the Department of Engineering of the University of Perugia, prof. Luigi Ferrigno from Cassino University reported the results of the in-anechoic chamber measurments performed on the first prototype of the magnetic positioning system. He presented the frequency response of receiving coils considering a passband relative to the -3 dB half signal amplitude points. He also showed the results of conducted immunity tests performed with a CDN (coupling decoupling networks) coupling a multisine disturbance to the system. The CDN was used to inject the disturbance toward the receiving coils or toward the data acquisition system. These results will be useful in order to design a new prototype more accurate and more robust with respect to EM disturbances.
This monday the Perugia group met their project partners at the University of Cassino. The aim of the meeting was to plan experimental activities of electromagnetic compatibility on the magnetic positioning system prototype prepared by the Perugia group.
The prototype has been mounted in the semi-anechoic chamber (see picture above) of the electric engineering department. The system has been tested first without any disturbances to characterize its ideal performances. Then a preliminary conducted immunity test has been performed using a continuous wave coupled through a CDN (coupling decoupling networks).
A set of tests has been planned to be conducted in the next days by the Cassino group. The CDN will be used to couple the system with continuous and modulated waves, exploring several amplitudes and bandwidths. These tests will allow to identify weak points of the system with respect to electromagnetic disturbances and how the latter influence the precision of positioning.
Comparison of Measurement Models for 3D Magnetic Localization and Tracking
Guido De Angelis, Alessio De Angelis, Antonio Moschitta and Paolo Carbone
Sensors2017, 17(11), 2527
Abstract
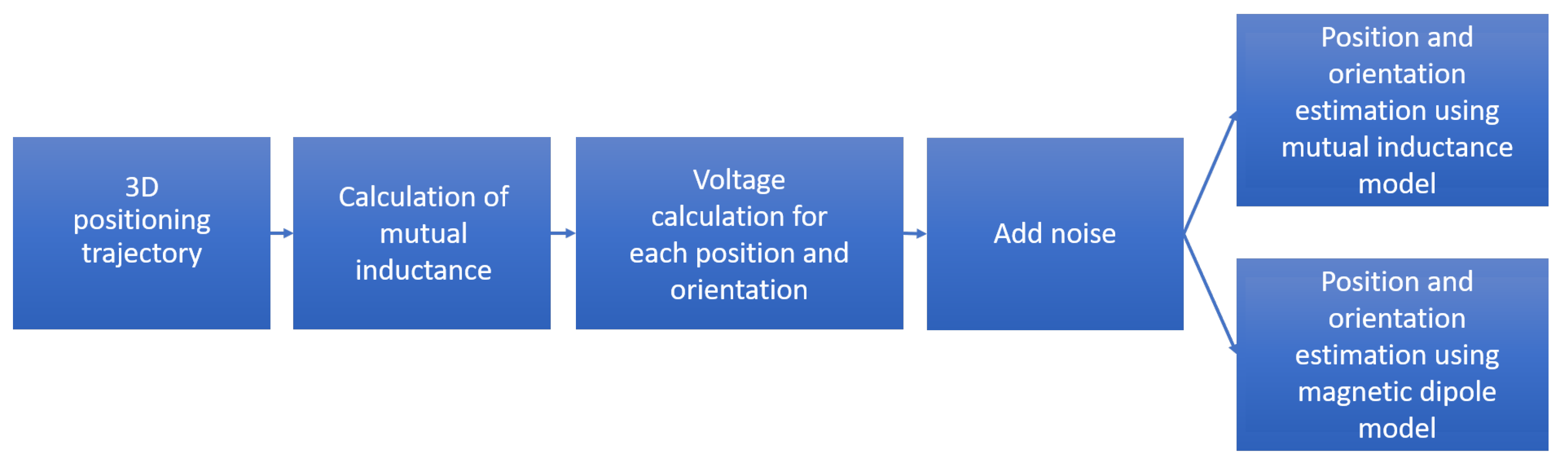
In this paper, we consider magnetic positioning and tracking of objects and provide a comparison of the characteristics of two major measurement models: the magnetic dipole model and the mutual inductance model. The numerical results obtained by applying these models to a short-range position measurement application, with a maximum operating distance of approximately 50 cm, are compared. Based on the results of this comparison, a prototype 9-sensor array is developed, experimental tests are performed, and extensive measurement results are presented. Outcomes show the feasibility of tracking the position and orientation of a mobile coil in real time with a median positioning error below 1 cm and a worst-case error of about 2 cm and 11 degrees inside a spatial region of 30 × 30 × 30 cm3 operational volume.